安藤ハザマ(本社:東京都港区、社長:福富正人)は、コンクリートダムにおける品質および生産性の向上を目指し、コンクリート打設における敷均し、締固め管理を現場の指揮者がタブレットを用いてリアルタイムに実施できる「敷均し・締固め統合管理システム」(以下、本システム)を開発しました。
1.開発の背景
コンクリートダム(RCD工法(注1))や台形CSG(注2)の打設では、ブルドーザによる敷均しや振動ローラによる締固めを、同一エリア内で複数台を使用して行っています(写真1)。ブルドーザの敷均し厚さや振動ローラによる締固め回数は、堤体の築造に使用するRCDコンクリートやCSGの密度や強度といった品質に大きく影響するため、事前の試験施工を行って最適な敷均し厚、締固め回数を決定します。
現在、敷均し厚さや締固め回数、それらに使用する機械の軌跡管理はGNSS(注3)を用いたマシンガイダンスなどにより重機オペレータが運転室のモニターで確認できるシステムが用いられることが多くなりましたが、現場の指揮者がこれらをリアルタイムに確認できる状況とはなっていませんでした。
当社では、建機の自動運転技術において、GNSSを用いた振動ローラ単体での締固め回数のモニター表示は、既に現場検証ならびにエリアを限定した現場運用を完了しておりますが(注4)、今般、複数台のブルドーザおよび振動ローラでの敷均しから締固めまでの打設状況と、それらを重ね合わせた結果をタブレット上でリアルタイムに確認できるシステムを開発しました。
2.本システムの特長
本システムの主な特長は以下のとおりです。
-
タブレット上にシステムを搭載したすべての重機の稼働状況が表示されます(図1)。これにより指揮者は全体の作業状況、進捗が把握できます。
-
個別の重機を選択すると詳細な作業状況が確認できます(表1)。これにより、作業の過不足や効率性が把握でき、その場で是正指示が行えます。
-
各重機に搭載したモニター(写真2)から、オペレータは自身の作業状況に加え、周りの重機の状況もが確認できます。
-
転圧回数は合算でき、転圧回数が不足している個所を見つけた場合、近くの別の振動ローラに対応を指示できます。
-
端部や構造物周りで使用する小型振動ローラにも対応しており、振動ローラを使用するすべての箇所の状況を確認できます(表2)。
-
建機の自動運転にも対応可能です(写真3)。
-
1日の作業内容は現場事務所のパソコン内に保存し、帳票として出力できます。
実機試験では、システムを搭載した19t級湿地式ブルドーザ2台、11t級振動ローラ2台を同時に稼働させ、施工状況の確認を行いました。試験ヤード内のすべての重機の稼働状況および個別重機の詳細な作業状況をタブレットで確認できました。また、小型振動ローラにマシンガイダンス機能を付加し、狭隘箇所を想定した同様の実機試験を行いました。
4.本システムの効果
本システムの使用により、指揮者はその場で全体および個別の作業状況を確認することができ、施工不良個所を素早く把握し、改善・是正が可能になりました。これにより、「作業効率の向上」「作業能力の向上」「作業の平準化」につながり、品質および生産性の向上を確認しました。
5.今後の展開
RCD工法によるコンクリートダムや台形CSGダムでの敷均し、締固めの他、フィルダムの盛立や大型造成工事などで幅広く本システムを導入することで、品質および生産性の向上を目指します。
また、本システムで出力できる帳票は、ダムの維持管理時の基礎データとなり、長寿命化の一助となり、将来にわたり人々が安全で安心して生活できる社会資本整備に貢献していきます。
-
RCD工法:コンクリートダムの合理化施工法として開発されたもので、 セメント量を少なくし、水和熱の発生を抑えた超硬練りのコンクリート(スランプ=0cm)をブルドーザで敷均し、 振動ローラで締め固める工法。
-
台形CSGダム:ダム型式の1つで、砂礫に水とセメントを配合して生成されたCSG(cemented sand and gravel) を台形状に打設したダム。RCD工法同様にCSGをブルドーザで敷均し、 振動ローラで締め固めて構築するダム。
-
GNSS:GNSS(Global Navigation Satellite System / 全球測位衛星システム)は、GPS、GLONASS、Galileo、準天頂衛星(QZSS)等の衛星測位システムの総称。
-
自動運転システムと新しい品質管理手法を組み合わせた施工を実現
-自動運転振動ローラにICT飽和度システムを搭載し実施工に適用-
(安藤ハザマ:2019年4月24日公表)

写真1:ダムコンクリートの敷均し・締固め状況
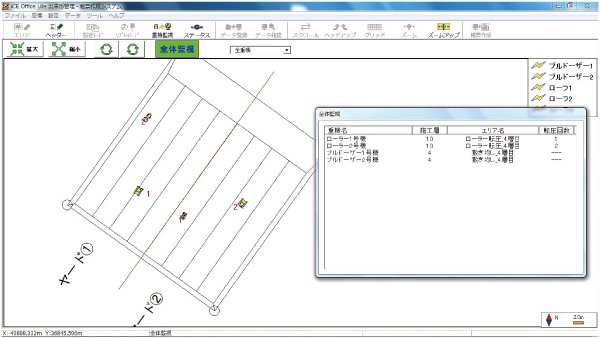
図1:タブレットによる打設エリア全体稼働状況
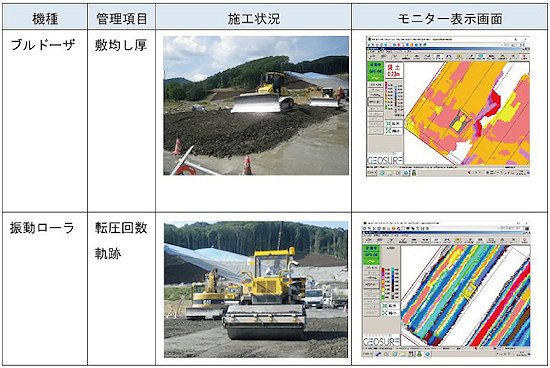
表1:タブレットによる個別重機の稼働詳細状況(周りの重機の稼働情報付加)

写真2:タブレット画面とオペレータ画面(左:タブレット、右:重機モニター)

表2:タブレットによる小型振動ローラの稼働詳細状況(他の振動ローラの軌跡情報付加

写真3:振動ローラの自動運転と指揮者のリアルタイムでの確認
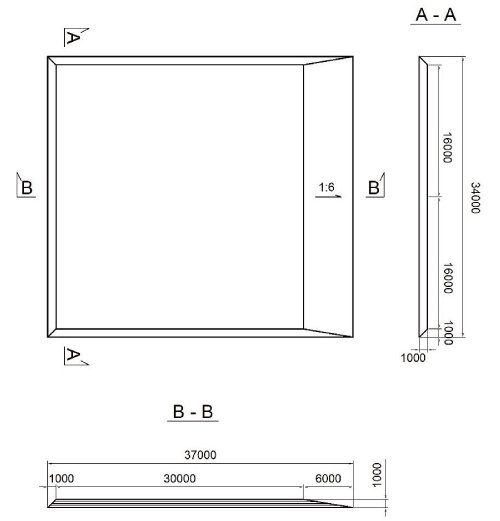
図2:敷均し・締固め管理システム実機試験ヤード

表3:実機試験項目