安藤ハザマ(本社:東京都港区、社長:福富正人)は、生産性と安全性の向上を目的として、ダムや造成工事の転圧作業で使用する振動ローラの自動運転システムを開発し、さらに、高品質な施工を実現する新しい品質管理手法と組み合わせ、実施工に適用しました。
1.開発の背景
建設業では、就労者の高齢化や将来的な減少が見込まれており、熟練技術の継承や施工の効率化が課題となっています。また、国土強靭化計画などで、より高品質なものが求められるようになっています。
その対策として、ICTを活用した技術開発が盛んに行われており、当社も、品質、生産性、および安全性の向上を目的とした建設機械の自動化技術に取り組んでいます。
2.本システムの特長
当社は自動運転振動ローラを開発し、そこに先駆的に取り組んできた新しい品質管理手法「CCV-飽和度モニタリングシステム」を組み合わせることで、生産性と安全性を高めるとともに、高品質の施工を実現しました。
(1)自動運転振動ローラ
当社が開発した振動ローラは、GNSS(注1)や各種センサを装備しており、これらのセンサ情報から車体の位置や方向、操舵角などを把握して車体を自動的に運転・制御します。本システムの前後進走行時の直進精度の平均誤差は実証実験時68mmとなっており、熟練オペレータと同等の高い運転精度であることを確認しています。
(2)「CCV-飽和度モニタリングシステム」の搭載
当社保有の最適飽和度をリアルタイムに把握できる施工管理システム「CCV-飽和度モニタリングシステム」(注2)を自動運転振動ローラに搭載しました。それにより、締固め状態をリアルタイムに面的に把握し、高品質な施工を可能とします。
3.実施工への適用
本システムを建設中の「新環境工場等敷地造成工事(1工区)」(注3)へ適用しました。施工範囲を座標で設定することで、走行ルートの算定、指定回数での転圧作業の自動化を実現しました。
また、「CCV-飽和度モニタリングシステム」により、本工事において自動転圧作業中の締固め状態をリアルタイムに把握し、全施工面で品質が確保出来ていることを確認しました。
4.今後の展開
当社は、生産性の向上など建設機械の自動化技術の効果を最大限発揮するため、複数の建設機械による一連の作業の自動化や普及に向けた各種改善に取り組んでいます。同時により効果的な品質管理を目的に、自動化技術とICTを活用した品質管理手法等との連携もさらに進めます。今後もこれらの技術開発を強力に推進し、高品質な社会基盤の整備に貢献してまいります。
-
GNSS
Global Navigation Satellite Systemの略で「GPS」「GLONASS」等の衛星測位システムの総称。 -
CCV-飽和度モニタリングシステム
振動ローラに取付けたGNSSと加速度計によって、位置情報と加速度応答値(CCV値)を取得し、それらの情報と別途測定した含水比(一定値と仮定する)を組合せることで土の密度や飽和度といった品質情報をリアルタイムかつ面的に評価するシステム -
工 事 名 : 新環境工場等敷地造成工事(1工区)
発 注 者 : 菊池環境保全組合
工事場所 : 熊本県合志市幾久富地内
工事期間 : 2018年4月2日~2019年7月31日
工事数量 : 路体盛土(148,511m3),路床盛土(7,778m3),残土処理(28,145m3),
生石灰改良(156,289m3),その他1式

写真1: 開発した振動ローラ

写真2: 自動運転による振動ローラの施工状況
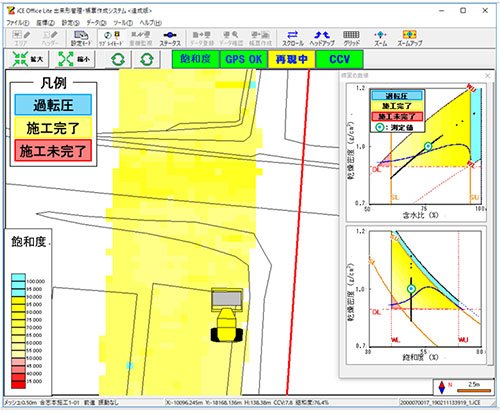
図1: CCV-飽和度モニタリングシステムの動作画面