技術概要
定点カメラのリアルタイム映像から定量的な情報を取得、あるいは三次元設計データ等の情報を重畳表示することで、工事の進捗を定量的に把握可能なシステムです。
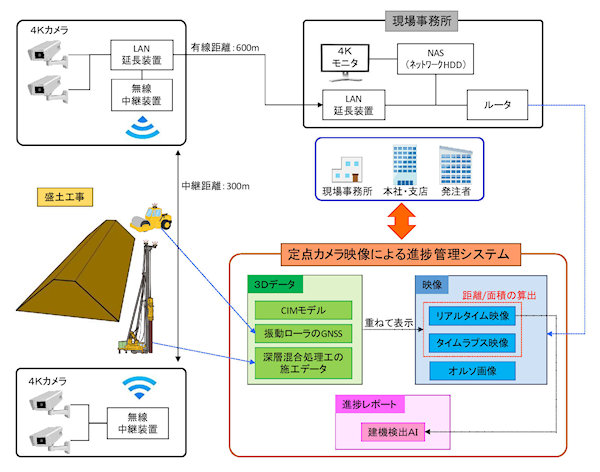
システム概要図
技術紹介動画
特長

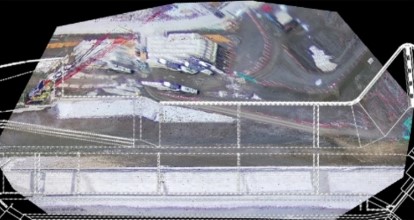
三次元設計データの重畳表示
定点カメラのリアルタイム映像上に、CIMモデルや盛土の転圧管理での振動ローラのGNSSデータを重畳して表示することができます。

映像データから距離面積の算出
パソコン画面上を直接選択することで、映像上の任意地点間の距離や面積を算出できます。

建機検出AIによる進捗レポートの作成
AIによる建機の検出で、土工事の主要建機(ダンプ、バックホウ、ブルドーザ、振動ローラ)を識別します。
識別結果をもとに進捗レポートを作成し、建機稼働台数の推移を準リアルタイムで把握できます。
オルソ画像の作成
複数台のカメラ映像から、オルソ画像(俯瞰図)を作成します。
適用事例
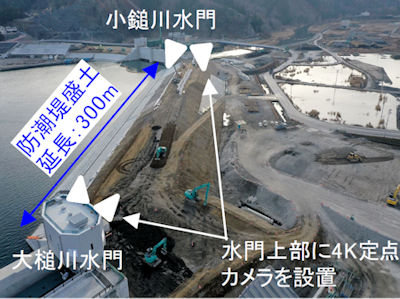
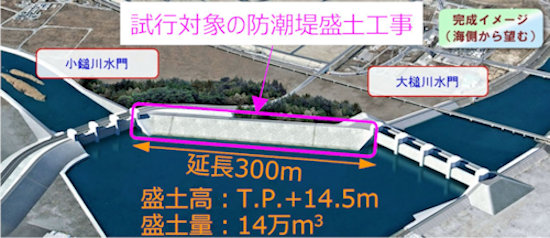
防潮堤工事において、施工範囲両端部にある水門2基の上部にカメラを設置し、システムを適用した事例
施工実績
大槌川筋大槌の1地区ほか河川災害復旧(23災617号及び622号)水門土木工事
発注者:岩手県
(延長300m、堤体土量140,000m3)
その他
本システムの開発および試行は、国土交通省の2019年度「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト」(PRISM)の業務であり、安藤ハザマを代表者とする映像進捗管理システム開発コンソーシアム(構成員:日本マルチメディア・イクイップメント株式会社、富士ソフト株式会社、計測ネットサービス株式会社、宮城大学)で実施したものです。